
E-mail-formatfejl
emailCannotEmpty
emailDoesExist
pwdLetterLimtTip
inconsistentPwd
resetAccountPassword
forTheAccount
pwdLetterLimtTip
inconsistentPwd
resetSuccess
resetSuccessTips
login


Den specifikke strctur af servo
2024-04-29 16:44:08
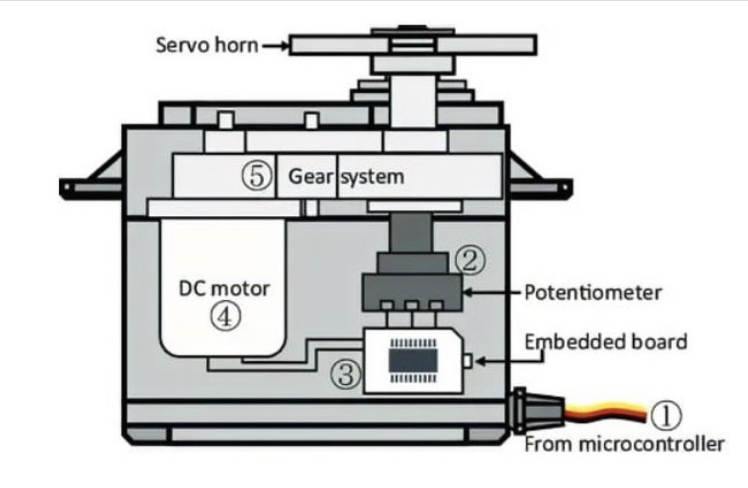
Servoens specifikke struktur er som følger:
①: Signallinie: Modtag styresignalet fra mikrokontrolleren;
②: Potentiometer: Det kan måle udgangsakslens placering, der hører til
Feedbackpart af hele servomekanismen;
③: intern controller: behandling af signalet fra den eksterne kontrol, drivkraft og drivkraft
Behandling af feedback -positionssignalet er kernen i hele servomekanismen;
④: Motor: Som aktuator, hvor meget hastighed, drejningsmoment, position output;
⑤: Transmissionsmekanisme/servo -system: Denne mekanisme skalerer udgangsslaget for
Motor til den endelige udgangsvinkel ifølge et bestemt transmissionsforhold;
Servoens output styres ved at sende et PWM -signal til servoens signallinje.
①: Signallinie: Modtag styresignalet fra mikrokontrolleren;
②: Potentiometer: Det kan måle udgangsakslens placering, der hører til
Feedbackpart af hele servomekanismen;
③: intern controller: behandling af signalet fra den eksterne kontrol, drivkraft og drivkraft
Behandling af feedback -positionssignalet er kernen i hele servomekanismen;
④: Motor: Som aktuator, hvor meget hastighed, drejningsmoment, position output;
⑤: Transmissionsmekanisme/servo -system: Denne mekanisme skalerer udgangsslaget for
Motor til den endelige udgangsvinkel ifølge et bestemt transmissionsforhold;
Servoens output styres ved at sende et PWM -signal til servoens signallinje.
Kontakt os
PRODUKTTAGS
Kontakt os
Giv venligst din forespørgsel i formularen nedenfor. Vi svarer dig inden for 24 timer.